This IC drives the high side MOSFET using the external bootstrap circuit as well as the low side MOSFET (which do not require any external circuit). So, this IC suits best as per the requirement of the circuit.


Fig. 2: Block Diagram of Modified Sine Wave Inverter



Fig. 5: Representational Image of IR-2110 IC
Lead/Pin assignments with pictorial representation of IR2110

Fig. 6: Prototype of Gate Driver Circuit for Modified Sine Wave Inverter
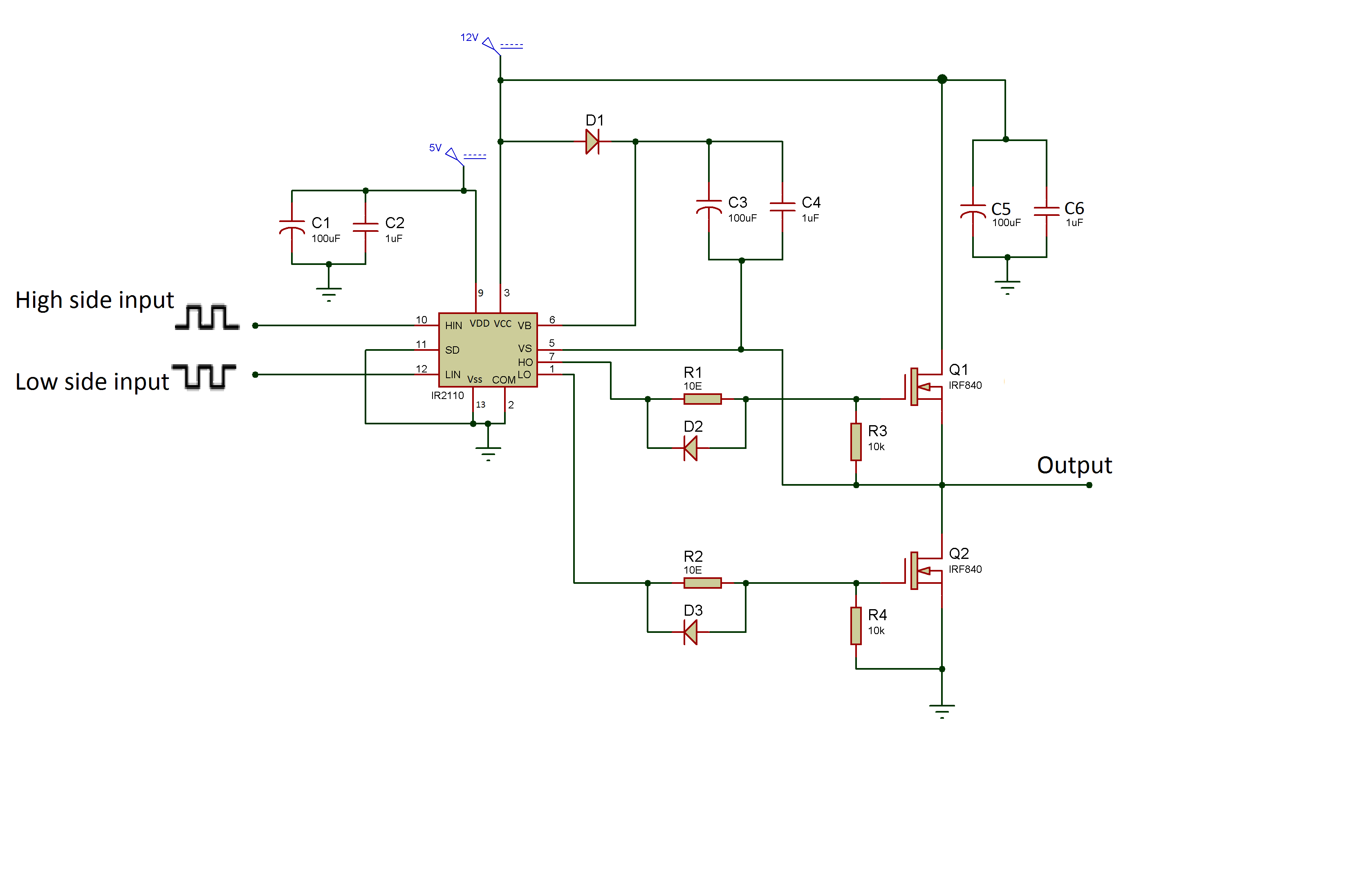
How the circuit works –
The operation of this circuit is based on the microcontroller programming which is used to provide signals for the gate driver circuitry. The microcontroller board used in the circuit is Arduino UNO. The Arduino is programmed for generating PWM signal for the input logic pins of the IR-2110 IC. For reference, check out the snapshot of the controller code given below –

For driving the high side MOSFET, the IR2110 is used along with the bootstrap circuitry. For input logic signal at Lin and Hin pin, two square waves of 180-degree phase difference are applied as both the MOSFETs should not turn on at the same time. In such a situation the MOSFETs can get damaged due to short circuiting at the output. As shown in the figure below the MOSFET Q1 is in high side configuration and MOSFET Q2 is in the low side configuration.
In this circuit, IRF840 MOSFET are used. These have a threshold voltage (Vth) in range from 10V to 12V. So the Vcc is equal to 12V and the threshold voltage is also 12V. When Hin is low and Lin is high so the transistor Q2 turns ON without any external circuit ( as Vg-Vs = 12 – 0 = 12V ) and transistor Q1 is OFF, it can be said that the low side MOSFET is ON in this case. Therefore the diode D1 is forward bias and the capacitor C3 starts charging from point a to b up to 12V through transistor Q2 and a low voltage is obtained at the output (as shown in the figure below).

Fig. 8: Circuit Diagram showing Charging of Bootstrap capacitor
In the next cycle when Hin is high and Lin is low then transitor Q2 turns OFF and transistor Q1 turns ON. That means the high side MOSFET is ON in this case.

The capacitor C3 is called bootstrap capacitor as it boosts up the 12 V input signal to 24 V for driving the high side MOSFET. The value of this bootstrap capacitor can be calculated by a standard formula. The standard formula requires many values like leakage current of the capacitor, the gate charge of MOSFET etc which are not generally known. So, the value of the capacitor can be determined by hit and trial method. It was observed that for 50Hz frequency, a 100uF polarized capacitor along with 1uF ceramic works fine. The same working priciple applies to the other half bridge so, a square wave of 12V is obtained at the output.

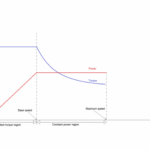
The Gate voltage should be 24 V as per the theoretical derivation, but practically, the waveform observed has a peak to peak voltage of 22 V. This gives Vgs equal to 10 V (22 V -12 V) and that much voltage is sufficient enough to turn ON the MOSFET.

Fig. 11: Graph showing Output waveform of half bridge FET circuit
The circuit designed in this tutorial can be used in designing of SMPS (switched mode power supply). It can be used in DC to AC converters and in induction heating applications. In the next tutorial, the modified sine wave inverter circuit will be completed by making full bridge MOSFET circuit and adding a step up transformer.
You may also like:


Project Source Code
### //Program to /* code of bootstrap circuit for driving the high side MOSFET*/ // the setup function runs once when you press reset or power the board void setup() { // initialize digital pin 2 and 3 as an output. pinMode(2, OUTPUT); // at Hin pin of Ir2110 IC pinMode(3, OUTPUT); // at Lin pin of Ir2110 IC } // the loop function runs over and over again forever void loop() { //initially 2 and 3 pin are low digitalWrite(3, HIGH); // Lin pin high delay(10); // wait for 10ms second digitalWrite(3, LOW); // Lin pin low delayMicroseconds(1); // dead time of 1us digitalWrite(2, HIGH); // Hin pin high delay(10); // wait for 10m second digitalWrite(2, LOW); // Hin pin LOW delayMicroseconds(1); // dead time of 1us } ###
Circuit Diagrams
Project Video
Filed Under: Power, Tutorials
Filed Under: Power, Tutorials
Questions related to this article?
👉Ask and discuss on Electro-Tech-Online.com and EDAboard.com forums.
Tell Us What You Think!!
You must be logged in to post a comment.